研究室スタッフ
 辛 徳 教授
辛 徳 教授専門分野
・ 生体信号処理
・ リハビリロボット
・ ウェアラブル機器
| 修士2年 |
|
||||||||
| 修士1年 |
|
||||||||
| 学部4年 |
|
研究概要
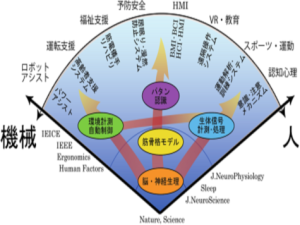
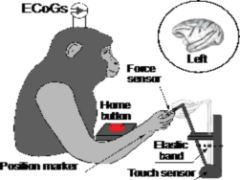
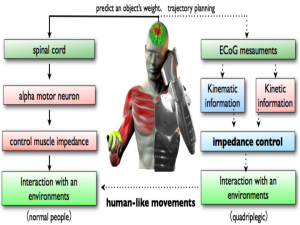
野球選手がボールを受け取る、音楽家がバイオリンを弾く時など、日常生活の様々な作業において、見回りの環境との相互作用は脳が腕の粘弾性を巧みに制御するから可能になります。もし、脳の仕組みを完全にわかるようになれば映画アイアンマンやロボコップのようなウェアラブルロボットを作ることができます。ウェアラブルロボット研究室では脳波、眼球信号、筋電信号など様々な生体信号を処理し、ロボットの制御を行う手法を研究しています。さらに、スポーツやリハビリテーションなど健康維持に役立つ研究も進めています。コンピュータネットワークを用いた共同研究が多く、色々な研究機関と共同研究も行っています。
代表的な研究テーマ
生体信号を用いた居眠り運転の検出
自動車死亡事故原因のほとんどがドライバーの意識集中低下によるものである。意識集中の低下による居眠りや漫然運転を防止するためにはドライバー検知型の予防安全システムが必要になっている。車載でドライバーの意識集中の低下を測るためには脳の神経メカニズムに基づいて、不随意性とロバスト性を持つ指標の発見とその検出方法が重要である。当研究室では脳の睡眠・覚醒メカニズムの研究から居眠りに関する最も重要な指標である緩徐眼球運動(視線の停留を伴わない低速な横方向の眼球運動, SEM;Slow Eye Movement)、瞳孔の大きさ、脳波、握力などに着目し、居眠りや漫然の条件と覚醒の条件で交通事故の直接的な原因である反応時間の遅れを調べる実験を行う。

ブレイン・マシン・インタフェース
車など移動体の最も理想的なインタフェースとは運転者の意志のとおり車が動いてくれるものである。最近、急速に進展している自律運転技術を用いることで、車という乗り物は前左右など3つの動作パターンがあれば基本的な操作が可能になる。一方、脳を理解し機械と直接つなごうとするブレイン・マシン・インタフェース(Brain Machine Interface)は脳工学とロボット工学の最先端をつなぐ技術である。当研究室では人間の脳を解明する脳の基礎研究と身体のさまざまな障害を補うシステムなどの臨床応用をつなぎ融合させる技術を研究している。
研究風景