

研究室スタッフ
 河野 仁 助教
河野 仁 助教専門分野
・知能ロボット
・学習システム
・災害対応ロボット
2021年度メンバー
| 修士2年 |
|
||||||
| 学部4年 |
|
研究概要
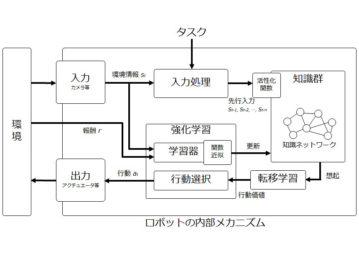
近年,ロボットは様々な場所で活躍しています.しかし,ロボットは全ての動きをヒトが操作できないくらいに高機能,高自由度になってきています.そのため,我々の社会・生活を豊かにするロボットを創り出すには,ロボット自ら賢くなる機能が重要であり,「手のかからないロボット」が理想です.そこで,知能ロボットシステム研究室では,ロボットのための学習メカニズムや,ロボット同士による学習した知識の活用など基礎的研究をはじめ,遠隔操作ロボットの半自律化など社会に役立つ知能ロボットの研究開発も行っています.
代表的な研究テーマ
ロボットが学習した知識の再利用
掃除ロボットや倉庫ロボットなど知的に動作するロボットが活躍しつつあります.それらのロボットを知能化する技術は,強化学習や深層学習など様々な研究がなされ枚挙にいとまがありません.しかし,これらの技術は学習の計算に長時間必要であったり,ある一つの仕事しか学習できなかったりします.本研究では,ロボット達がより適応的な動作を学習するために,心理学的知見も活用してロボットが学習した知識を活用・再利用する基礎的技術の研究を行っています.
遠隔操作ロボットの半自律化
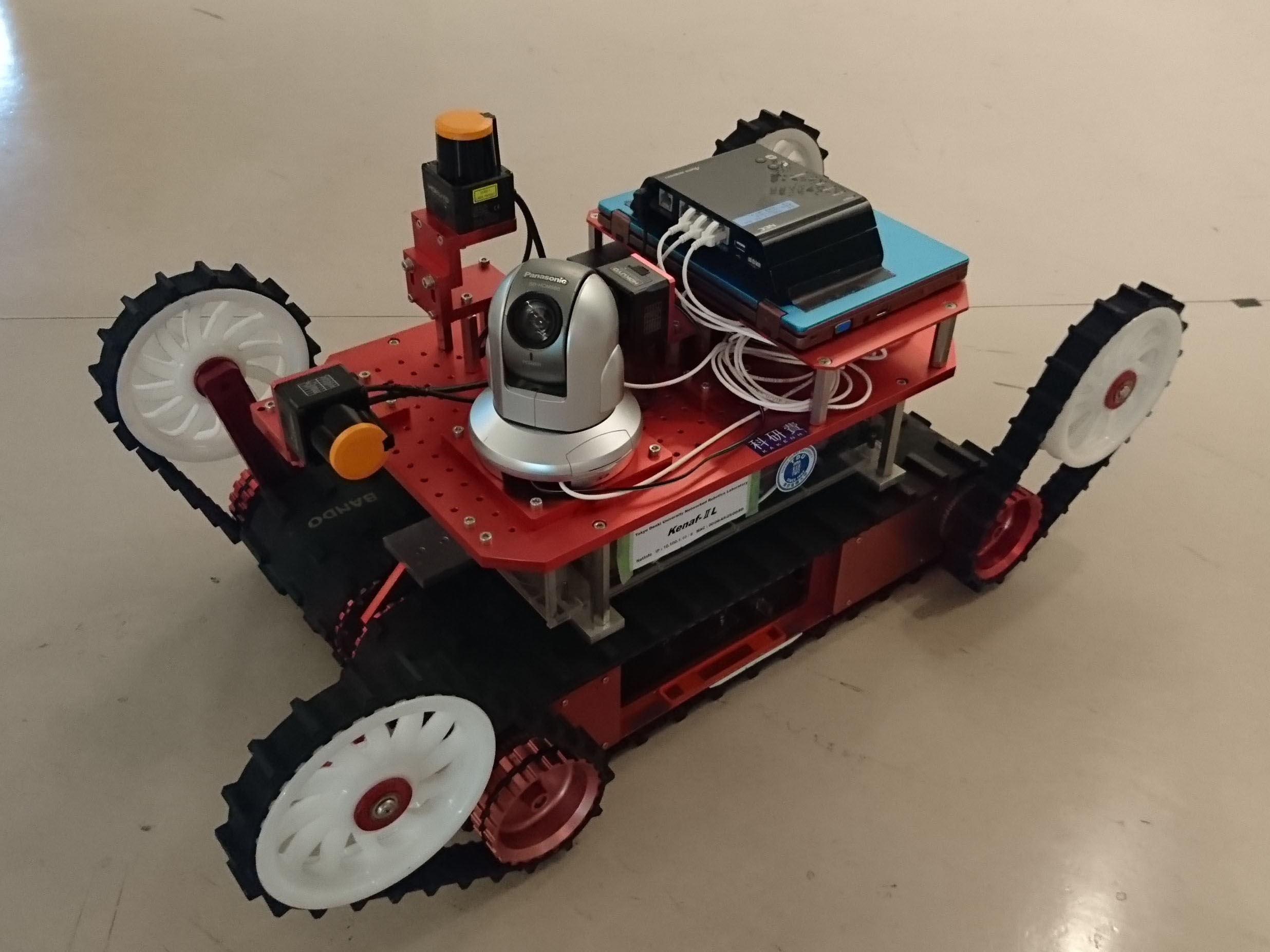
被災地等で活躍する災害対応ロボットはヒトにより遠隔操作されています.しかし,ロボットに搭載されたカメラやセンサから得られた情報をもとに遠隔操作をする場合,臨場感がなく通信遅延などの理由もあり訓練を受けた人でなければ操作することができません.そこで,ロボットが“ある程度”の情報から自律的に判断し,環境に対して適応的に判断・行動すれば,初心者でも簡単に操作することが可能だと考えます.本研究では,災害対応ロボットを知能化することで遠隔操作しやすいロボットシステムの実現を目指しています.
研究風景
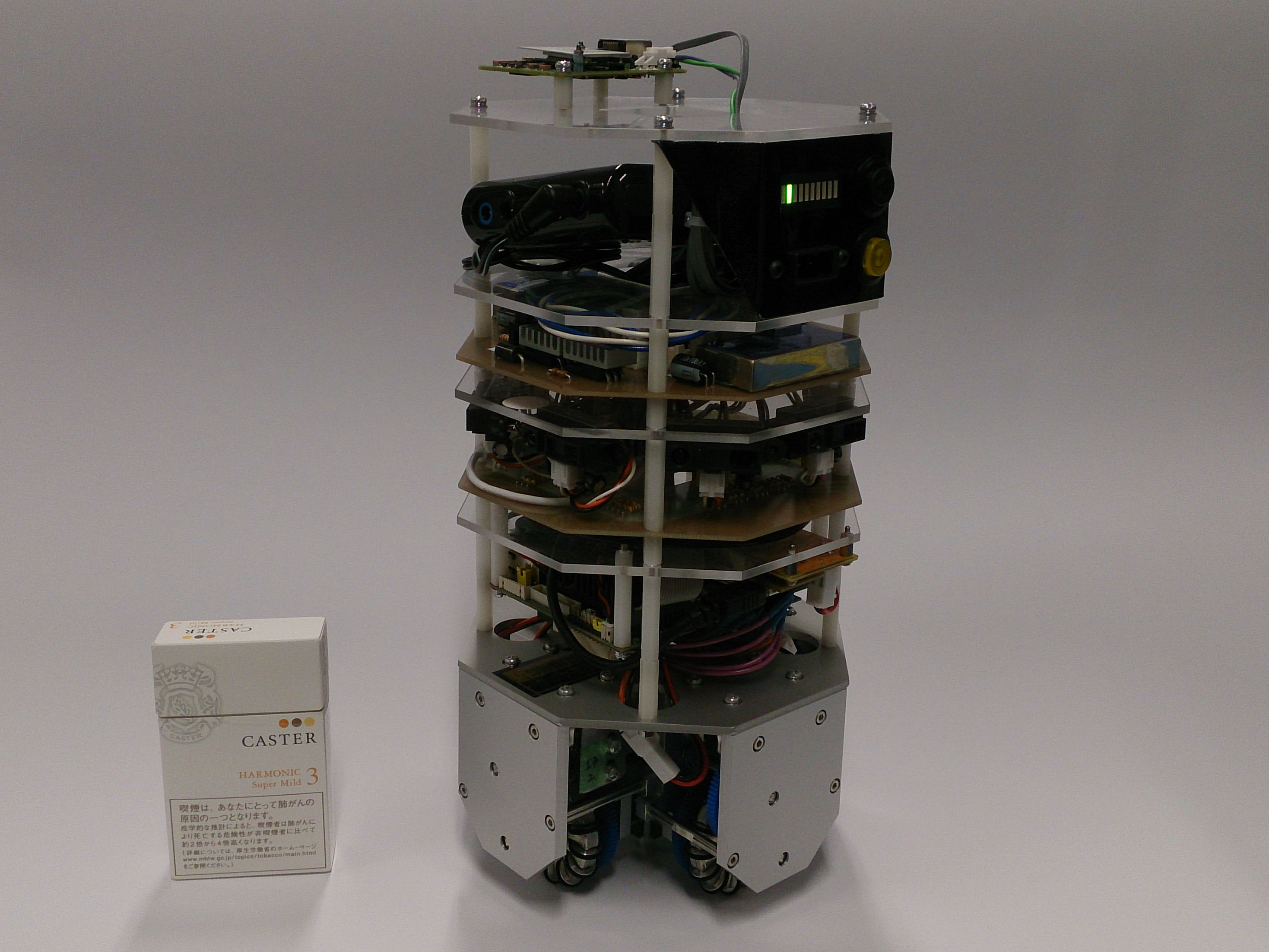
小型全方向移動ロボットZEN-Q
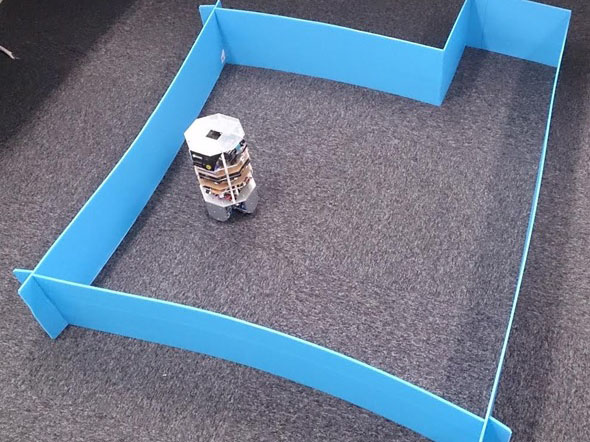
ロボットの強化学習実験
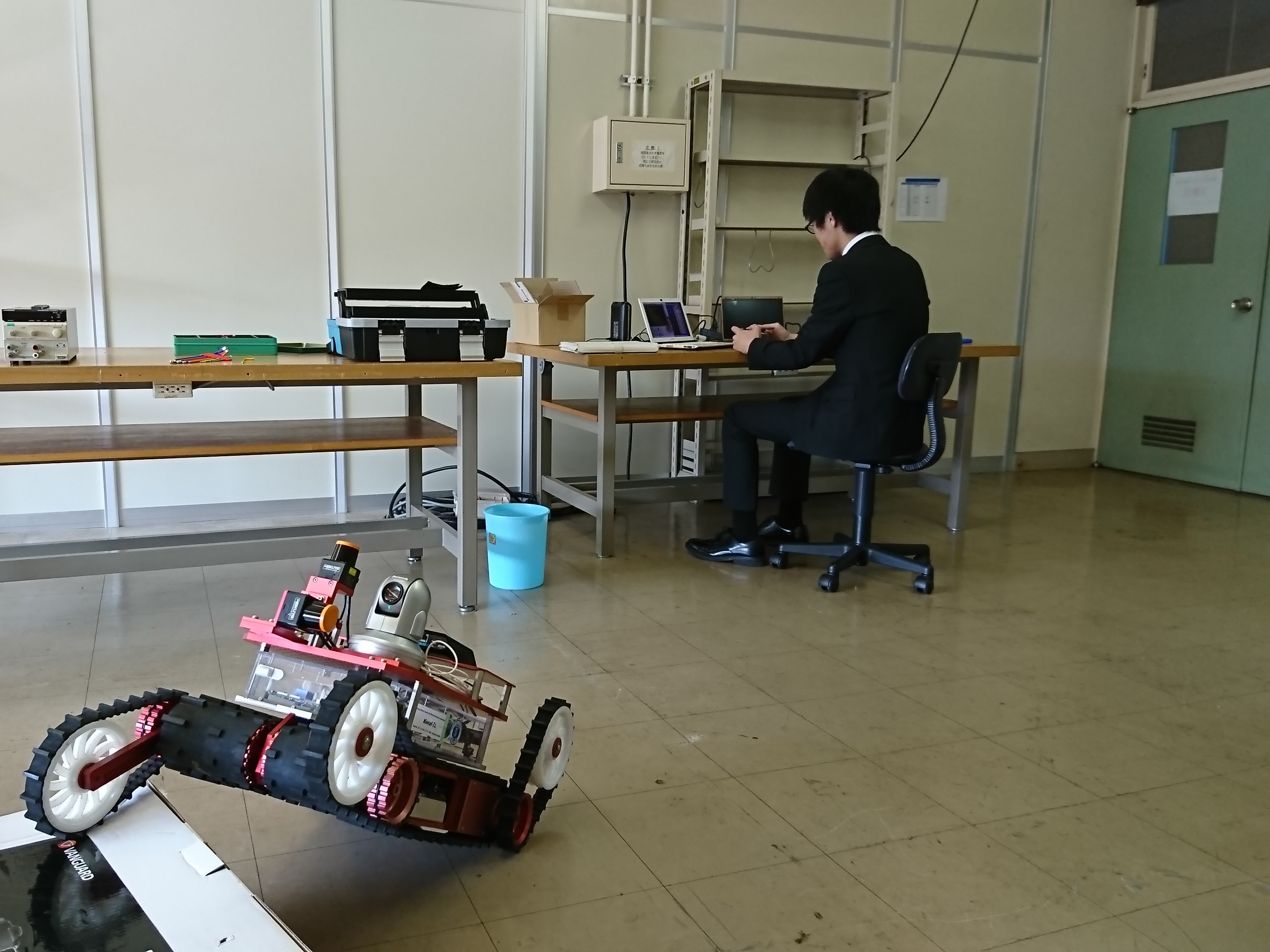
災害対応ロボットの遠隔操作